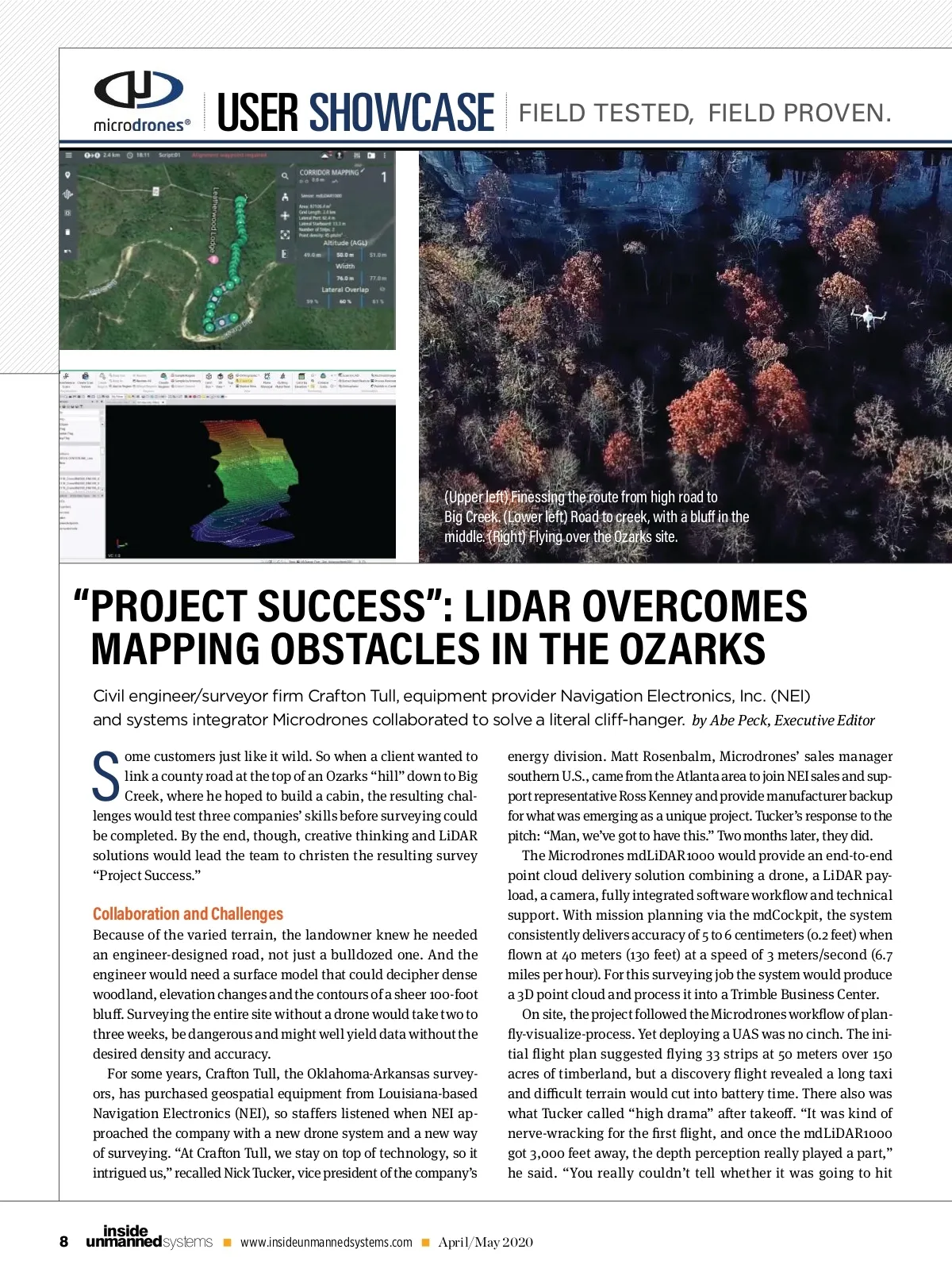
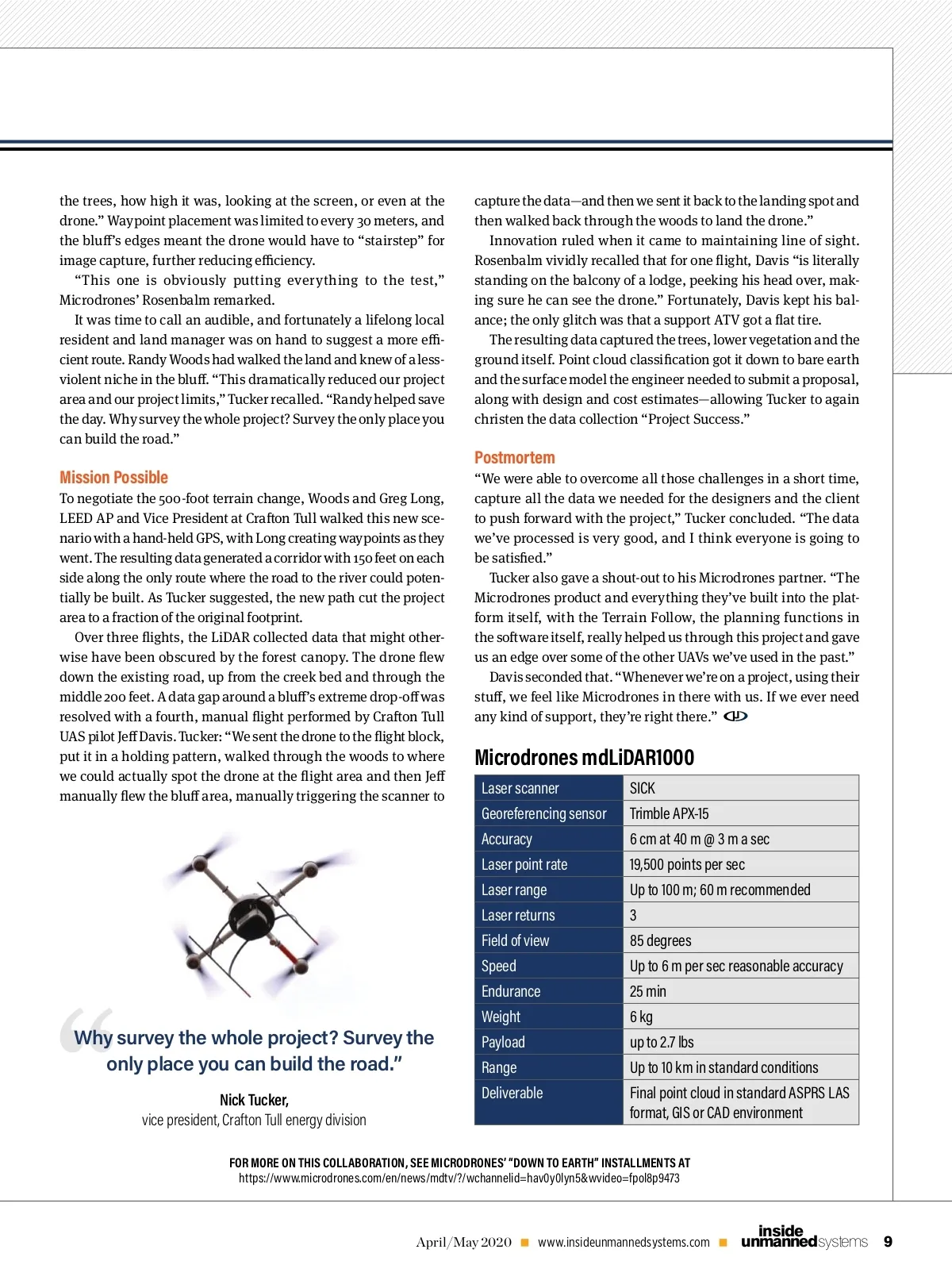
the trees, how high it was, looking at the screen, or even at the drone.” Waypoint placement was limited to every 30 meters, and the blu ’s edges meant the drone would have to “stairstep” for image capture, further reducing e ciency. “This one is obviously putting everything to the test,” Microdrones’ Rosenbalm remarked. It was time to call an audible, and fortunately a lifelong local resident and land manager was on hand to suggest a more e -cient route. Randy Woods had walked the land and knew of a less-violent niche in the blu . “This dramatically reduced our project area and our project limits,” Tucker recalled. “ Randy helped save the day. Why survey the whole project? Survey the only place you can build the road.” capture the data—and then we sent it back to the landing spot and then walked back through the woods to land the drone.” Innovation ruled when it came to maintaining line of sight. Rosenbalm vividly recalled that for one ight, Davis “is literally standing on the balcony of a lodge, peeking his head over, mak-ing sure he can see the drone.” Fortunately, Davis kept his bal-ance; the only glitch was that a support ATV got a at tire. The resulting data captured the trees, lower vegetation and the ground itself. Point cloud classi cation got it down to bare earth and the surface model the engineer needed to submit a proposal, along with design and cost estimates—allowing Tucker to again christen the data collection “Project Success.” Mission Possible To negotiate the 500-foot terrain change, Woods and Greg Long, LEED AP and Vice President at Cra on Tull walked this new sce-nario with a hand-held GPS, with Long creating waypoints as they went. The resulting data generated a corridor with 150 feet on each side along the only route where the road to the river could poten-tially be built. As Tucker suggested, the new path cut the project area to a fraction of the original footprint. Over three ights, the LiDAR collected data that might other-wise have been obscured by the forest canopy. The drone ew down the existing road, up from the creek bed and through the middle 200 feet. A data gap around a blu ’s extreme drop-o was resolved with a fourth, manual ight performed by Cra on Tull UAS pilot Je Davis. Tucker: “We sent the drone to the ight block, put it in a holding pattern, walked through the woods to where we could actually spot the drone at the ight area and then Je manually ew the blu area, manually triggering the scanner to Postmortem “We were able to overcome all those challenges in a short time, capture all the data we needed for the designers and the client to push forward with the project,” Tucker concluded. “The data we’ve processed is very good, and I think everyone is going to be satis ed.” Tucker also gave a shout-out to his Microdrones partner. “The Microdrones product and everything they’ve built into the plat-form itself, with the Terrain Follow, the planning functions in the so ware itself, really helped us through this project and gave us an edge over some of the other UAVs we’ve used in the past.” Davis seconded that. “Whenever we’re on a project, using their stu , we feel like Microdrones in there with us. If we ever need any kind of support, they’re right there.” Microdrones mdLiDAR Laser scanner Georeferencing sensor Accuracy Laser point rate Laser range Laser returns Field of view Speed Endurance Weight Payload Range Deliverable SICK Trimble APX-15 6 cm at 40 m @ 3 m a sec 19,500 points per sec Up to 100 m; 60 m recommended 3 85 degrees Up to 6 m per sec reasonable accuracy 25 min 6 kg up to 2.7 lbs Up to 10 km in standard conditions Final point cloud in standard ASPRS LAS format, GIS or CAD environment “ Why survey the whole project? Survey the only place you can build the road.” Nick Tucker, vice president, Crafton Tull energy division FOR MORE ON THIS COLLABORATION, SEE MICRODRONES’ “DOWN TO EARTH” INSTALLMENTS AT https://www.microdrones.com/en/news/mdtv/?/wchannelid=hav0y0lyn5&wvideo=fpol8p9473 April/May 2020 www.insideunmannedsystems.com unmanned systems inside 9
Inside Unmanned Systems April/May 2020: Page 9